常見畸變問題:
使用攝(she)像機時,場(chang)景中實際(ji)水(shui)平或豎直的(de)物(wu)體,從圖像上看卻發生了(le)形變(如圖:左(zuo)側(ce)樹、電線桿(gan)出現彎(wan)曲),往往認為是(shi)攝(she)像機出現了(le)故障


常見畸變類型
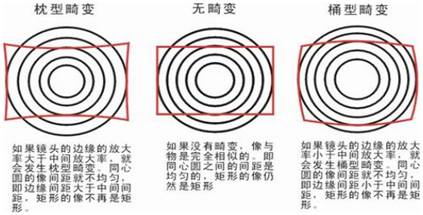
鏡頭由若干組凸和凹透鏡構成、由于鏡頭焦平面上不同區域對影像的放大率不同,因而形成的畫面會存在扭曲變形現象,這(zhe)種(zhong)變(bian)(bian)形的(de)程(cheng)度(du)從畫面中心(xin)至(zhi)畫面邊緣依(yi)次(ci)遞(di)增,主要(yao)在(zai)畫面邊緣反映得(de)較明顯(xian),可以(yi)說所有鏡頭(tou)都存(cun)在(zai)或多或少畸變(bian)(bian)的(de)問題,畸變(bian)(bian)屬于(yu)成像的(de)幾何失真(zhen),常見(jian)有枕(zhen)型(xing)畸變(bian)(bian)和桶型(xing)畸變(bian)(bian):
桶形畸變:廣(guang)角(jiao)鏡頭或(huo)使用變焦鏡頭的廣(guang)角(jiao)端(duan)時最容易發生(sheng)
枕形畸變:長(chang)焦鏡頭(tou)或使用變(bian)焦鏡頭(tou)的長(chang)焦端(duan)時最容易發生
最常見的是桶(tong)行畸變現象,一般小于6mm的廣角鏡(jing)頭(tou)會有明顯的桶(tong)形(xing)畸變,而且(qie)越(yue)趨于廣角,其畸變表現越(yue)明顯 。
影響畸變的因素
畸變的計算公式如下:
α=h/[2*f*tan(θ/2) ]-1,其中
α表示畸變系數
h表示成像sensor寬度(du)
f表示鏡頭焦距
θ表示鏡頭水平視場角
由以(yi)上(shang)公式可以(yi)得知:
① 畸變和鏡頭焦距成(cheng)反(fan)比,鏡頭焦距越小,其(qi)畸變越大。
② 畸(ji)(ji)變(bian)和(he)傳(chuan)感器Sensor的有效成像靶面寬度(du)成正(zheng)比(bi),Sensor成像寬度(du)越大,畸(ji)(ji)變(bian)越大。
③ 相同焦(jiao)距情況下(xia),鏡(jing)頭(tou)視(shi)場(chang)角越大,其畸變(bian)越大。 越靠鏡(jing)頭(tou)中心取(qu)景,圖像畸變(bian)現象越小。





